- 中文网站请点击 http://www.pinxinggroup.com
-
 +86-21-57566731
+86-21-57566731
-
 cai@pinxingmotor.com
cai@pinxingmotor.com
-
 بارگیری کردن
بارگیری کردن

مزایای کلیدی استفاده از موتورهای روتور سه فاز در کاربردهای صنعتی چیست؟
در عصری که تحت سلطه درایوهای فرکانس متغیر (VFD) است، میتوان این را در نظر گرفت موتور روتور سه فاز یک فناوری میراثی با این حال، وارد هر کارخانه فرآوری سنگین، معدن، یا تأسیسات حمل و نقل مواد در مقیاس بزرگ شوید، و خواهید دید که این اسبهای کار بهطور قابلاطمینانی در انجام سختترین وظایف نیرو میدهند. سوال در مورد منسوخ بودن نیست، بلکه تخصص است: برای کاربردهای خاص با گشتاور بالا و اینرسی بالا، موتور روتور زخمی ترکیبی از عملکرد، استحکام، و مقرون به صرفه بودن را ارائه می دهد که جایگزین های مدرن اغلب برای مطابقت با آن تلاش می کنند. این مقاله فراتر از اصول اولیه است و تجزیه و تحلیلی در سطح مهندس از مزایای کلیدی ارائه می دهد موتورهای روتور سه فاز در کاربردهای صنعتی، از شروع کنترل شده تا نگهداری عملی ضروری است.
اصل اساسی: قدرت کنترل روتور خارجی
بر خلاف موتور قفس سنجابی که مدار روتور آن برای همیشه کوتاه است، ویژگی تعیین کننده یک موتور روتور زخمی سیم پیچ روتور سه فاز آن است که از طریق حلقه های لغزنده و برس ها به استاتور منتقل می شود. این معماری امکان اتصال مقاومت های خارجی یا کنترل های الکترونیکی را به مدار روتور فراهم می کند. این تفاوت ساده و در عین حال عمیق امکان دستکاری مستقیم مشخصه گشتاور-سرعت موتور را فراهم می کند. با افزایش مقاومت روتور خارجی در هنگام راهاندازی، امپدانس مؤثر روتور افزایش مییابد که به طور همزمان جریان هجومی را محدود میکند و گشتاور موجود را از سرعت صفر به حداکثر میرساند - قابلیتی که در طراحی موتور ذاتی است.
مزیت اصلی 1: عملکرد عالی در شروع برای بارهای سنگین
اینجاست که موتورهای روتور زخمی واقعاً برتر هستند. توانایی آنها در ارائه گشتاور راهاندازی بالا با جریان راهاندازی کم، دو مشکل حیاتی صنعتی را حل میکند: فشار مکانیکی روی تجهیزات رانده و استرس الکتریکی روی منبع تغذیه.
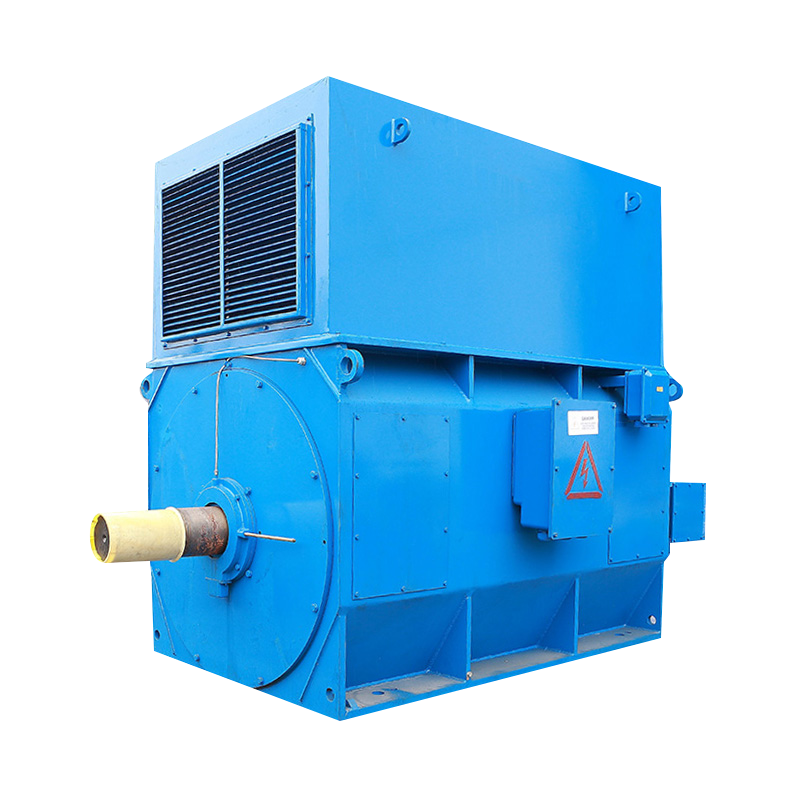
غلبه بر اینرسی بالا: انتخاب ایده آل برای سنگ شکن و آسیاب
هنگام مقایسه الف موتور روتور سه فاز در مقابل قفس سنجاب برای کاربرد سنگ شکن ، برتری روتور زخم مشخص است. سنگ شکن ها، آسیاب های گلوله ای و فن های بزرگ دارای اینرسی چرخشی عظیم هستند. یک موتور قفس سنجابی استاندارد که از روی خط راه اندازی می شود، 600-800٪ جریان بار کامل را می کشد در حالی که تنها 150-200٪ گشتاور نامی را ارائه می دهد و باعث افت شدید شبکه و شتاب طولانی و استرس زا می شود. یک موتور روتور پیچ خورده با مقاومت های خارجی با اندازه مناسب می تواند 200-250٪ گشتاور بار کامل را ارائه دهد در حالی که فقط 150-200٪ جریان را می کشد. این منجر به شتاب صاف، کنترلشده و سریعتر بار با اینرسی بالا میشود و سایش را بر روی دندهها، کوپلینگها و خود ماشینآلات به حداقل میرساند.
دقت در حرکت: راه حل حیاتی ایمنی برای بالابرها
سوال از چرا از موتور روتور زخمی برای کاربردهای بالابر استفاده کنید؟ مراکز کنترل و ایمنی بالابرها و جرثقیل ها نه تنها به گشتاور راه اندازی بالا برای بلند کردن بار نیاز دارند، بلکه مهمتر از آن به کنترل دقیق در حین شتاب و کاهش سرعت برای جلوگیری از نوسان بار نیاز دارند. کنترل مقاومت پلکانی موتور روتور زخمی به اپراتورها اجازه می دهد تا به آرامی از طریق شتاب گیری پیشرفت کنند و مهمتر از همه، از مقاومت ها برای ترمز الکتریکی کنترل شده در هنگام پایین آوردن استفاده کنند. این یک قابلیت ذاتی "شروع نرم" و "توقف نرم" را ارائه می دهد که ایمنی را افزایش می دهد، شوک مکانیکی را کاهش می دهد و امکان لکه گیری دقیق بار را فراهم می کند، که دستیابی به آن به همان اندازه قابل اطمینان با یک تنظیم اولیه موتور قفس سنجابی دشوار است.
مزیت اصلی 2: کنترل سرعت قوی و اقتصادی
برای کاربردهایی که نیاز به تغییر سرعت محدود دارند، موتورهای روتور پیچشی راه حلی بسیار محکم ارائه می دهند. درک کردن نحوه کنترل سرعت موتور روتور سه فاز ساده است: با تغییر مقاومت در مدار روتور، لغزش موتور و در نتیجه سرعت آن را تغییر می دهید. مقاومت بیشتر برابر است با لغزش بیشتر و سرعت عملیات کمتر. این روش وسیله ای ساده، مقرون به صرفه و قوی برای کنترل سرعت فراهم می کند، به ویژه در محیط های سخت که ممکن است قطعات الکترونیکی ظریف از کار بیفتند.
- مقاومت های پله ای سنتی: دسته های بزرگ اما بسیار قوی مقاومت ها از طریق کنتاکتورها سوئیچ می شوند. ایده آل برای محیط های کثیف و گرم.
- رئوستات مایع: با تغییر سطح الکترولیت یا غوطه وری صفحه، که اغلب در موتورهای حلقه لغزشی بسیار پرقدرت استفاده می شود، شتاب نرم تری ایجاد کنید.
- کنترلرهای روتور حالت جامد: خردکن های الکترونیکی مدرن که مقاومت موثر را با کنترل PWM تغییر می دهند و نسبت به مقاومت های پله ای راندمان و کنترل دقیق تری را ارائه می دهند.
هنگام ارزیابی گزینههای کنترل سرعت، یک نکته کلیدی برای مهندسان، هزینه کل مالکیت و تناسب محیطی است. جدول زیر راه حل روتور زخمی را با موتور قفس سنجابی مبتنی بر VFD در همه جا برای یک کاربرد معمولی با توان بالا و محدوده سرعت محدود مقایسه می کند.
| ویژگی | موتور روتور زخمی با کنترل مقاومت | موتور قفس سنجابی با VFD |
| هزینه اولیه (قدرت بالا) | به طور کلی برای موتور و سیستم کنترل پایین تر است. | به طور قابل توجهی بالاتر، به ویژه برای درایوهایی که دارای گشتاور راه اندازی بالا هستند. |
| محدوده کنترل سرعت | محدود (معمولاً 50-100٪ سرعت سنکرون). بهترین برای کاهش سرعت ثابت یا پله ای. | بسیار گسترده (0-120٪). عالی برای تغییرات دقیق و مداوم سرعت. |
| ناهمواری محیطی | عالی بانک های مقاومت و موتور در برابر گرد و غبار، رطوبت و نوسانات دما بسیار مقاوم هستند. | متوسط تا فقیر. VFD ها به محیط های تمیز و خنک یا محفظه های محافظ گران قیمت نیاز دارند. |
| هارمونیک و ضریب قدرت | هارمونیک های سمت خط تولید نمی کند. ضریب قدرت با کاهش سرعت کاهش می یابد. | هارمونیک هایی تولید می کند که نیاز به کاهش دارند. می تواند ضریب توان بالا را در سراسر محدوده حفظ کند. |
| پیچیدگی تعمیر و نگهداری | مکانیکی/الکتریکی (برس، مقاومت، کنتاکتور). قابل پیش بینی و اغلب ساده است. | الکترونیکی. برای عیب یابی نیاز به دانش تخصصی دارد. |
مزیت اصلی 3: شبکه ذاتی و حفاظت از تجهیزات
مستقیم ترین مزیت برق پاسخگویی است چگونه موتورهای روتور زخمی جریان هجومی را کاهش می دهند؟ . با طراحی، جریان راهاندازی معمولاً بین 150 تا 200 درصد FLC در مقایسه با 600 تا 800 درصد برای موتور قفس سنجابی DOL حفظ میشود. این پیامدهای تجاری قابل توجهی دارد:
- کاهش تاثیر شبکه: از کاهش ولتاژ که می تواند سایر تجهیزات حساس در همان منبع را مختل کند، جلوگیری می کند.
- هزینه زیرساخت کمتر: امکان استفاده از ترانسفورماتورهای کوچکتر و کابل کشی را فراهم می کند و هزینه سرمایه اولیه را کاهش می دهد.
- شروع نرم ذاتی: افزایش گشتاور کنترل شده از تجهیزات رانده شده در برابر ضربه های مکانیکی ناگهانی محافظت می کند و طول عمر گیربکس ها، نوار نقاله ها و کوپلینگ ها را افزایش می دهد.
زمینه صنعت: جایگاه در حال تحول در دنیای VFD
در حالی که پذیرش VFD همچنان در حال رشد است، موتور روتور زخمی ثابت باقی نمانده است. جایگاه آن با تقاضای مداوم و به روز رسانی های تکنولوژیکی تقویت می شود. بر اساس تجزیه و تحلیل بازار الکتروفنی در سال 2024 که بر صنایع سنگین متمرکز شده است، تقاضا برای راه حل های راه اندازی با گشتاور بالا در بازارهای نوظهور با زیرساخت شبکه کمتر پایدار، شاهد رشد سالانه 3 تا 5 درصدی ثابت بوده است، با سیستم های روتور پیچی مدرن شده که دارای کنترلرهای روتور حالت جامد هستند، سهم قابل توجهی را به خود اختصاص داده اند. علاوه بر این، آخرین ویرایش سال 2023 استاندارد IEC 60034-30-1 برای کلاسهای بازده موتور، در حالی که عمدتاً موتورهای قفس سنجابی را هدف قرار میدهد، باعث توسعه در بهینهسازی راندمان کامل سیستم درایو کاربردهای روتور پیچخورده شده است، از جمله طرحهای کنترلی بهبود یافته برای مقاومتهای خارجی و کاهش تلفات در حین کارکرد مقاومتهای خارجی.
منبع: IEC - استانداردهای بین المللی الکتروتکنیکی گزارش های تحلیل بازار و صنعت
اطمینان از قابلیت اطمینان طولانی مدت: بهترین شیوه های نگهداری
مزایای عملکرد موتورهای روتور پیچی به نگهداری مناسب بستگی دارد. یک برنامه تعمیر و نگهداری ساختاریافته ضروری است.
مراقبت پیشگیرانه: راهنمای تعمیر و نگهداری حلقه لغزنده برای موتور القایی روتور زخمی
حلقه لغزنده و مجموعه برس جزء سایش اصلی سیستم است. بهترین شیوه ها عبارتند از:
- بازرسی و نظافت منظم: تجمع گرد و غبار را بررسی کنید (گرد و غبار کربن رسانا به ویژه مضر است) و با یک پارچه بدون رشته و پاک کننده مناسب تمیز کنید.
- سایش و فشار برس: طول برس را به طور منظم اندازه گیری کنید و بر اساس مشخصات سازنده جایگزین کنید. اطمینان حاصل کنید که فشار فنر یکنواخت و صحیح است تا تماس خوبی داشته باشید و جرقه را به حداقل برسانید.
- وضعیت سطح حلقه لغزنده: مانیتور برای شیار، سوراخ شدن، یا سایش ناهموار. نگهداری سبک با کاغذ ساینده خوب ممکن است کافی باشد. موارد شدید نیاز به ماشینکاری مجدد حرفه ای دارند.
- مشاهده جرقه: مقداری جرقه در لبه انتهایی برس طبیعی است. جرقه زدن بیش از حد (فراتر از استانداردهای IEC/GB) نشان دهنده مشکلات فشار، سطح حلقه یا درجه برس است.
یک عملی عیب یابی مشکلات رایج موتور روتور سه فاز
راهنمای مرجع سریع برای مسائل رایج:
- جرقه/ساییدگی بیش از حد برس: فشار برس، درجه و وضعیت سطح حلقه لغزش را بررسی کنید. اطمینان حاصل کنید که حلقه ها تمیز و متحدالمرکز هستند.
- موتور آهسته کار می کند / بیش از حد گرم می شود: احتمال خطا در مدار مقاومت خارجی (اتصال باز، کنتاکتور خراب، پله گیر کرده است). بانک مقاومت و توالی کنترل را بررسی کنید.
- جریان فاز ناهموار: می تواند نشان دهنده یک مدار باز در یک فاز روتور (سرب شکسته، برس به شدت فرسوده)، یا عدم تعادل در مقاومت های خارجی باشد.
- لرزش/نویز: یاتاقان های فرسوده را بررسی کنید (مشترک در همه موتورها) اما از نظر کشش ناهموار برس یا مشکلات مکانیکی مجموعه حلقه لغزنده را نیز بررسی کنید.
سوالات متداول: موتورهای روتور سه فاز
1. آیا موتورهای روتور پیچشی کارایی کمتری نسبت به موتورهای VFD دارند؟
در سرعت کامل با روتور کوتاه، کارایی آنها با موتور قفس سنجابی کلاس مشابه قابل مقایسه است. در طول کاهش سرعت از طریق مقاومت، با از بین رفتن تلفات لغزش در مقاومتها، راندمان کاهش مییابد. یک VFD مدرن می تواند در طیف وسیعی از سرعت کارآمدتر باشد. با این حال، برای کاربردهای با سرعت ثابت یا برد محدود، تفاوت کل راندمان سیستم ممکن است ناچیز باشد و هزینه اولیه کمتر و استحکام بیشتر سیستم روتور زخمی میتواند هزینه کل مالکیت بهتری را ارائه دهد.
2. آیا نگهداری برس یک عیب بزرگ است؟
این یک ملاحظه است، نه لزوماً یک اشکال. نگهداری برس و حلقه لغزش یک کار قابل پیش بینی و برنامه ریزی شده است. در محیط های سخت، این تعمیر و نگهداری مکانیکی اغلب بر خرابی الکترونیک حساس VFD ترجیح داده می شود. مواد و طرح های برس مدرن فواصل خدمات به طور قابل توجهی افزایش یافته است، که گاهی اوقات بیش از 12-18 ماه کار مداوم است.
3. آیا می توان از موتور روتور زخمی با VFD استفاده کرد؟
بله، در پیکربندی به نام سیستم "دوبار تغذیه"، اما پیچیده و غیر معمول است. به طور عملی تر، VFD ها را می توان در سمت استاتور موتور روتور زخمی (با روتور کوتاه) استفاده کرد، اما این مزیت های شروع آن را نفی می کند و در مقایسه با استفاده از موتور قفس سنجاب استاندارد به ندرت مقرون به صرفه است.
4. دلایل اصلی انتخاب امروز چیست؟
محرک های تصمیم گیری اولیه عبارتند از: 1) نیاز به گشتاور راه اندازی بسیار بالا با جریان هجومی محدود (برای سنگ شکن ها، کمپرسورها)، 2) نیاز به کنترل سرعت ساده و ناهموار در محیط های خشن (کثیف، مرطوب، گرم)، و 3) کاربردهایی که در آن شتاب/کاهش سرعت کنترل شده به دلایل ایمنی یا حمل و نقل فرآیند (بالابرها، بالابرهای بزرگ) حیاتی است.
5. چگونه بفهمم که برنامه من به یک نیاز دارد؟
تجزیه و تحلیل دقیق ترن محرکه را انجام دهید. سوالات کلیدی: WR چیست؟ 2 (لحظه اینرسی) بار؟ گشتاور شکست و شتاب مورد نیاز چقدر است؟ محدودیت های شبکه چیست؟ محیط عملیاتی چیست؟ اگر آنالیز به اینرسی بالا، گشتاور راهاندازی بالا و نیاز به راهاندازی کنترلشده در محدودیتهای شبکه اشاره میکند، موتور روتور پیچدار باید یکی از رقبای اصلی باشد.

با هم تماس گرفتن
محصولات مرتبط
")
")
")
")
")
")
")
")
")
شرکت موتور ضد انفجار ، آموزشی ویبولیتین
-
 cai@pinxingmotor.com
cai@pinxingmotor.com
-
 +86-21-57566731
+86-21-57566731
-
 +86-21-57566967
+86-21-57566967
-
 No.699 ، Pinxing Rd. ، Zone Industrial Qinggang ، منطقه Fengxian ، شانگهای ، چین.
No.699 ، Pinxing Rd. ، Zone Industrial Qinggang ، منطقه Fengxian ، شانگهای ، چین.
-
شماره 168 ، Qingling Rd ، منطقه صنعتی چینگگانگ ، شهر چینگکون ، منطقه فنگکسین ، شانگهای ، چین (دروازه جنوبی)
کپی رایت@ 2024 شرکت موتور ضد انفجار Pinxing Shanghai ، Ltd. کلیه حقوق محفوظ است.
حریم خصوصی $ $


